PRESSURE REDUCING VALVE DREE20-6X/200YMG24K31A1M
Manufacturer: Bosch Rexroth
Material #: R901275714
Model : DREE20-6X/200YMG24K31A1M
***Disclaimer: The following summary contains information gathered from various sources such as product descriptions, technical specifications and catalogs. While efforts have been made to provide accurate details, inaccuracies may occur. It is advised to verify all information by contacting Bosch Rexroth directly.***
The Bosch Rexroth DREE20-6X/200YMG24K31A1M (R901275714) is a high-performance industrial hydraulic valve designed for reliable pressure reduction in accordance with the command value signal. This valve is part of the DREME series, featuring a proportional solenoid for operation and an integrated electronics system. It is engineered for subplate mounting with a porting pattern that complies with ISO standards, ensuring compatibility and ease of installation.
With its size B rating and CETOP D connection, the valve can support a maximum operating pressure of up to 315 bar, while facilitating a maximum flow rate of 200 liters per minute. The electrical connection is facilitated through a Connector pole PE according to DIN EN specifications, ensuring secure and stable connectivity. The supply voltage required for operation is 24 VDC.
This Bosch Rexroth valve offers a number of sophisticated features, including a linearized pressure-command value characteristic curve that contributes to its excellent transient response. The design also includes an optional check valve between ports A and B and an optional maximum pressure limitation for added safety and control over system pressures.
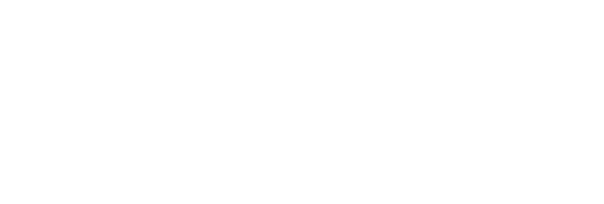
The DREE20-6X/200YMG24K31A1M valve consists of several key components: the pilot control valve with proportional solenoid, main valve with main spool insert, housing with control electronics, and optionally, a check valve. It ensures steady performance by maintaining constant pilot flow independent of the pressure drop between channels A and B. Additionally, it allows for free flow back from channel A to B when equipped with an optional check valve.
Suitable for various hydraulic fluids like HL, HLP, HLPD, HVLP, HVLPD, and HFC (with NBR seals), this Bosch Rexroth hydraulic valve meets CE conformity according to EMC Directive EU standards. Its robust construction makes it ideal for demanding applications requiring precise pressure reduction capabilities.
$3,838.00 USD
More are expected on October 14, 2026
Note: Sales tax, shipping, and applicable tariffs will be calculated at checkout.| Qty | Price | Savings |
|---|---|---|
| 5-24 | $3,742.05 USD | $95.95 USD |
| 25+ | $3,646.10 USD | $191.90 USD |
Status: This product is temporarily out of stock.
Qty: Delivered as early as October 14, 2026 when ordered in
This product is eligible for factory repair.
Size 20, B → A, electrical with integrated electronics, 24 VDC
Industrial hydraulic valve in a high performance range. Reliable reduction of the pressure to the command value signal.
Unpacked Weight: 6.161 kg
Valve for reducing a system pressure Operation by means of a proportional solenoid Proportional solenoid with rotatable and detachable coil For subplate mounting: porting pattern according to ISO 5781 Third way A to Y (Ø 7.5 mm) Linearized pressure/command value characteristic curve Good transient response Optional check valve between A and B Optional maximum pressure limitation With integrated electronics (OBE)
Valves of type DRE(M)E are pilot-operated pressure reducing valves. They are used for operating pressure reduction.
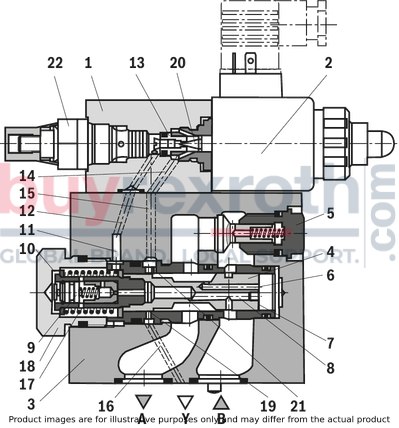
These valves basically consist of a pilot control valve (1) with proportional solenoid (2), a main valve (3) with main spool insert (4), as well as an optional check valve (5). On the proportional solenoid, there is moreover a housing (23) with the control electronics. Supply and command value voltage are applied at the connector (24). At the factory, the command value pressure characteristic curve is adjusted with little manufacturing tolerance.
Type DREE...
The pressure in channel A is set in a command value-dependent form via the proportional solenoid (2).
In rest position – no pressure in channel B –, the spring (17) holds the main spool (4) in its initial position. The connection from channel B to A is closed. A start-up jump is thereby prevented.
The pressure in channel A acts on the surface (7) of the main spool via the bore (6). The pilot oil is taken from channel B and flows through the bore (8) to the constant-current control (9) that keeps the pilot flow constant independent of the pressure drop between channel A and B. From
the constant-current control (9), the pilot flow flows in den spring chamber (10), through the bores (11) and (12) via the valve seat (13) into channel Y (14, 15, 16) and from there to the return flow. The pressure required in channel A is preset at the related amplifier. The proportional solenoid moves the valve poppet (20) in the direction of the valve seat (13) and limits the pressure in the spring chamber (10) to the set value. If the pressure in channel A is lower than the preset command value, the higher pressure in the spring chamber (10) moves the main spool to the right. The connection from B to A is opened. If the set pressure in A is reached, the forces at the main spool are balanced – the main spool is in control position.
Pressure in channel A • Spool face (7) = pressure in spring chamber (10) • Spool face – spring force (17)
If in a standing hydraulic fluid column (e. g. cylinder piston at stop), the pressure in A is to be reduced, (e. g.) a lower command value is preset at the control electronics and in this way a lower pressure is preselected which is present immediately in the spring chamber (10). The higher pressure in A which acts on the surface (7) of the main spool pushes the main spool to the stop against the plug screw (18). The connection A to B is blocked and A to Y is open. The force of the spring (17) now counteracts the hydraulic force acting on the surface (7) of the main spool. In this main spool position, the hydraulic fluid can flow from channel A via the control edge (19) to Y into the return flow.
When the pressure in A has dropped to the pressure in the spring chamber (10) plus ∆p from spring (17), the main spool closes the large control bores in the socket at the control edge A to Y.
The residual pressure differential of approx. 10 bar to the new command value pressure in A is now only unloaded via the fine control bore (21). In this way, a favorable transient response without pressure undershoot is achieved. For the free flow back from channel A to B, a check valve (5) can optionally be installed. Part of this flow from channel A simultaneously flows into the return flow via the open control edge (19) of the main spool A to Y.
Type DREME...
For hydraulic protection against an inadmissibly high electric control current at the proportional solenoid, which imperatively results in excessive pressures in port A, you can optionally install a spring-loaded pressure relief valve as maximum pressure limitation (22). The maximum pressure limitation is pre-set based on the relevant pressure rating (see table).
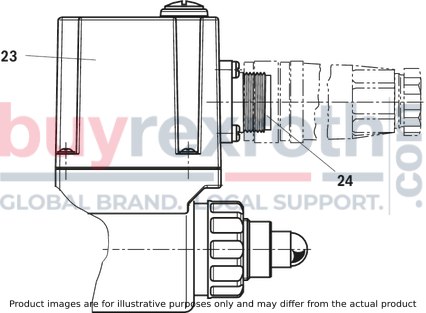
(measured with HLP46, ϑOil = 40 ±5 °C)
Pressure in port A dependent on the command value (flow = 0.8 l/min)
DRE(M)E
Pressure in channel A dependent on the flow qv
(characteristic curves with constant Δp)
Size 10

Pressure in channel A dependent on the flow qv
(characteristic curves with constant Δp)
NG25

Pressure differential from A to B via the check valve

Pressure differential from B to A

Pressure in channel A dependent on the command value
Pressure rating 50 bar

Pressure rating 100 bar

Pressure rating 200 bar

Pressure rating 315 bar

Pressure rating 200 bar (with VT-SSPA1)

Comparison series 5X-6X / pressure rating 100 bar (with amplifier VT-VSPA1-1-1X with 800 mA coil)

Comparison series 5X-6X / pressure rating 315 bar (with amplifier VT-VSPA1-1-1X with 800 mA coil)

Type DREE-6X/...YM...

Type DREME-6X/...YM...

Type DREME-6X/...Y...

Type DREE-6X/...Y...

|
Pin assignment |
Contact |
Assignment interface "A1" |
Assignment interface "F1" |
|
Power supply |
A |
24VDC(u(t)=21...35V);Imax≤1,5A |
|
|
B |
0V |
||
|
Reference potential actual value |
C |
Reference contact F; 0 V |
Reference contact F; 0 V |
|
Differential amplifier input (command value) |
D |
0 ... 10 V; Re = 100 kΩ |
4 ... 20 mA; Re = 100 kΩ |
|
E |
Reference potential command value |
||
|
Measuring output (actual value) |
F |
0 to 1.6 V actual value (1 mV ≙ 1 mA); |
|
|
PE |
connected to solenoid and valve housing |
||
Connection cable
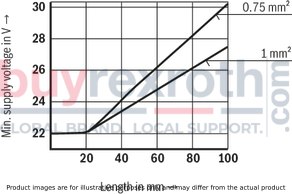
| 1) | Connection cable:- Recommendation 6-wire, 0.75 or 1mm2 plus protective earthing conductor and screening- Connect screening to PE on supply side only- Maximum admissible length 100 m The minimum supply voltage at the power supply unit depends on the length of the supply line (see diagram) |
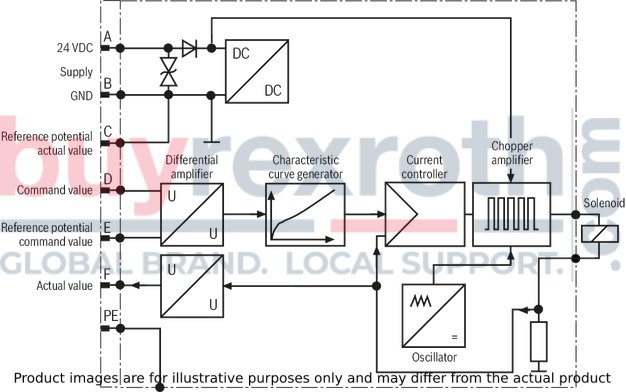
Integrated electronics (OBE)
Function
The electronics are supplied with voltage via ports A and B. The command value is applied to the differential amplifier ports D and E.Via the characteristic curve generator, the command value solenoid current characteristic curve is adjusted to the valve so that non-linearities in the hydraulic system are compensated and thus, a linear command value pressure characteristic curve is created.The current controller controls the solenoid current independently of the solenoid coil resistance.The power stage of the electronics for controlling the proportional solenoid is a chopper amplifier with a clock frequency of approx. 180 Hz to 400 Hz. The output signal is pulse-width modulated (PWM). For checking the solenoid current, a voltage can be measured at the connector between pin F(+) and pin C(–) which is proportional to the solenoid current. 1 mV corresponds to 1 mA solenoid current.
Block diagram / pin assignment
|
Size |
10 | 25 | ||
|
B1 |
mm |
85 | 102 | |
|
B2 |
mm |
66.7 | 79.4 | |
|
B3 |
58.8 mm | 73 mm | ||
|
B4 |
7.9 mm | 6.4 mm | ||
|
ØD1 |
mm |
15 | 25 | |
|
ØD2 |
H11 |
mm |
21.8 | 34.8 |
|
H1 |
mm |
192 | 206 | |
|
H2 |
mm |
123 | 137 | |
|
H3 |
mm |
58 | 64 | |
|
H4 |
mm |
36 | 44 | |
|
L1 |
mm |
42.9 | 60.3 | |
|
L2 |
mm |
35.8 | 49.2 | |
|
L3 |
mm |
31.8 | 44.5 | |
|
L4 |
mm |
21.5 | 20.6 | |
|
L5 |
mm |
7.2 | 11.1 | |
|
L6 |
21.5 mm | 39.7 mm | ||
|
L7 |
5 mm | 12.2 mm | ||
|
L8 |
116 mm | |||
|
L9 |
44.5 mm | 27.3 mm | ||
|
L10 |
59.5 mm | 42 mm | ||
|
T1 |
mm |
2 | 2.9 | |
|
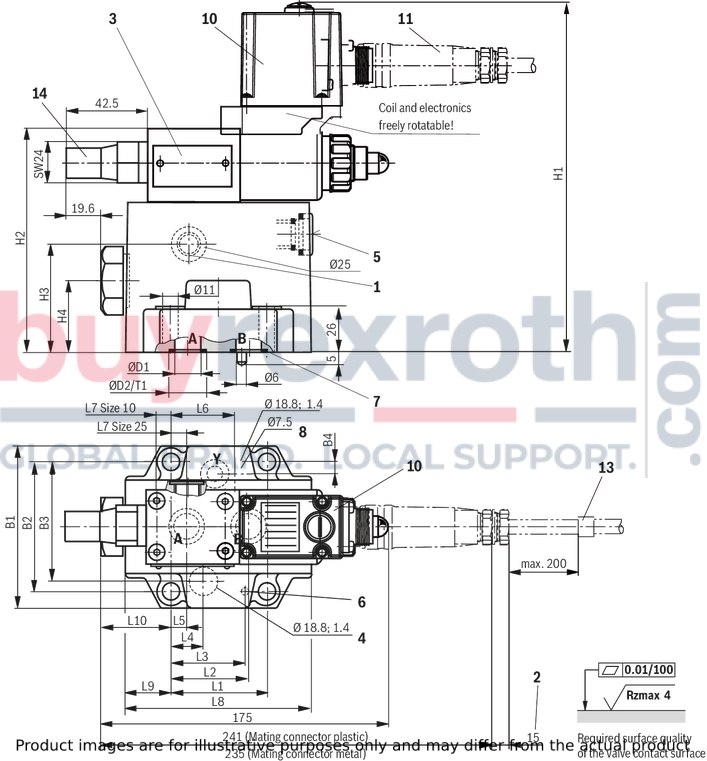
1 |
Upon delivery, this port (G1/4) is closed. After removal of the blanking plug, an external and separate depressurized pilot oil return to the tank is, however, also possible here. |
|
2 |
Space required to remove the mating connector |
|
3 |
Name plate |
|
4 |
Blind counterbore |
|
5 |
Check valve, optional |
|
6 |
Locating pin |
|
7 |
Identical seal rings for ports A and B Identical seal rings for port Y and blind counterbore (pos. 4) |
|
8 |
Pilot oil return always external, separate and depressurized to the tank or optional at pos. 1 |
|
9 |
mating connector according to DIN EN 175301-803 |
|
10 |
Integrated electronics (OBE) |
|
11 |
Mating connector according to DIN EN 175201-804 |
|
12 |
Machined valve contact surface; Porting pattern according to ISO 5781-06-07-0-00 (NG10) and ISO 5781 -08-10-0-00 (NG25) |
|
13 |
Cable fastening |
|
14 |
Maximum pressure limitation with version DREM and DREME |
Recommended valve mounting screws (separate order):
4 hexagon socket head cap screws ISO 4762 - M10 x 45 - 10.9-flZn-240h-L
(Friction coefficient μtotal = 0.09 to 0.14)
Tightening torque MA = 59 Nm ± 10%
or
4 hexagon socket head cap screws ISO 4762 - M10 x 45 - 10.9
(Friction coefficient μtotal = 0.12 to 0.17)
Tightening torque MA = 75 Nm ± 10%
Notice:
The dimensions are nominal dimensions which are subject to tolerances.
Mating connectors for valves with round connector, 6-pole + PE
7P Z31

Mating connectors for valves with round connector, 6-pole + PE
7P Z31
For valves with round connector according to EN 175201-804, 6-pole + PE as well as 6-pole, compatible with VG 95328Data sheet
Spare parts & repair
Related Products
R901278310
$3,838.00 USD
R901275714
$3,838.00 USD
R901311901
$3,838.00 USD
R901243781
$3,838.00 USD
R901358457
$3,276.00 USD