Manufacturer: Bosch Rexroth
Material #: R901239533
Model : VT-HACD-3-2X/0-I-00/000
***Disclaimer: The following summary contains information gathered from various sources such as product descriptions, technical specifications and catalogs. While efforts have been made to provide accurate details, inaccuracies may occur. It is advised to verify all information by contacting Bosch Rexroth directly.***
The Bosch Rexroth VT-HACD-3-2X/0-I-00/000 (R901239533) is a sophisticated control electronics module designed for top hat rail mounting within industrial automation systems. It leverages a microcontroller to manage processes, make adjustments, establish connections, and realize closed control loops. The module's configuration and parameterization are facilitated through the BODAC PC program, connecting to a PC via an RS serial interface cable without requiring additional hardware switches or programming knowledge.
The VT-HACD-3-2X/0-I-00/000 features a structural editor mode that allows users to create custom motion sequences by configuring blocks containing command values, ramp times, velocity, acceleration, and controller parameters. These blocks can be activated through various trigger conditions such as setting digital inputs or comparing signals against user-defined thresholds.
For signal processing, the module offers numerous linking options for input and output signals including addition, subtraction, multiplication, division, minimum and maximum value generation, ratio functions for area calculations like pressure differential measurement, signal limiting with the LIMIT function, jump generation with JUMP function and lag with low pass filtering.
The device accommodates analog I/O with four analog inputs configurable between 0-10V or 4-20mA through software settings. The analog outputs include one switchable between 0-10V or 4-20mA and two fixed at 0-10V. These outputs ensure full utilization of the analog-digital converter range while allowing for working range definition and error detection.
Digital I/O capabilities include 16 digital inputs and 16 digital outputs with one input dedicated to enabling functionality and one output indicating operational status. Additional inputs trigger block functions while outputs can be assigned various predefined functions such as command value comparisons or error status indications.
The module supports both SSI and incremental digital position measurement systems for precise actual value recording. It operates within a maximum frequency of 100 kHz for the incremental encoder input. The controller section is designed as a PIDT controller but can be customized to P or PT configurations if necessary.
Finally, the VT-HACD-3-2X/0-I-00/000 features extensive error detection mechanisms including monitoring of analog inputs ranges, sensor integrity checks like cable break detection control error monitoring when configured as a controller supply voltage checks internal voltage references microcontroller watchdogs and memory checksum validation ensuring reliable operation in complex automation tasks.
This product is not available. CLICK HERE to create a support ticket for us to locate your part or a suitable replacement
The VT-HACD-3-2X control electronics are a module for top hat rail mounting.
A microcontroller controls the entire process, makes adjustments, establishes connections and realizes the closed control loops. Data for configuration, command values and parameters are stored in a FLASH in a non-volatile form.
The BODAC PC program is used for the entire configuration and also for the parameterization and diagnosis. Besides the switches for address setting, the module is not equipped with any additional hardware switches. For the configuration, the HACD has to be connected to a PC via a serial interface (RS 232, 1:1 cable).
The configuration and thus the creation of applications are very simple - simply connect the pre-defined functional components. For this purpose, no programming knowledge is necessary.
A mode is available:
Structural editorOwn motion sequences can be established. For this purpose, 32 blocks are available.
Each block contains: Command value, ramp times, (velocity ±, acceleration ±) and controller parameters.
Blocks are activated by setting trigger conditions: Setting digital inputs, comparing signals with freely definable thresholds or expiry of waiting times.
Signal linking [6] [8] [17]
The HACD has various signal linking options both for the input and the output side, whereas 2 signals each can be linked. These are functions such as addition, subtraction, multiplication, division as well as minimum/maximum value generator, area ration and limiter:
+ = Addition: Z = X + Y
– = Subtraction: Z = X – Y
* = Multiplication: Z = X * Y / 100
/ = Division: Z = X / Y * 100
MIN = Minimum value generator: Z = MIN (X, Y)
MAX = Maximum value generator: Z = MAX (X, Y)
RATIO = Ratio input:
for RATIO >1: Z = X * RATIO – Y
for RATIO <1: Z = X – Y / RATIO
(e.g. area ratio for pressure differential measurement)
LIMIT = Signal limiter: Z = MIN (|X|, |Y|) * sign (X)
JUMP = Jump generator: Z = MAX (|X|, |Y|) * sign (X)
with Z … result
X … 1st signal
Y … 2nd signal
T1 Lag = Low pass filter
Analog I/O [1] [15]
The 6 analog inputs are switchable between ±10 V, 0…10 V, 0…20 mA by means of the software.
The analog output AO1 is switchable between ±10 V, 0…10 V, 0…20 mA and 4…20 mA by means of the software.
AO2 and AO3 are fixedly set to ±10 V.
The output is switched so that the whole range of the analog-digital converter is used.
Both working range and error detection can be defined for all analog inputs.
The analog outputs can be adjusted by means of amplification and offset.
Digital I/O [3] [16]
The HACD has 9 digital inputs and 8 digital outputs.
An input has the fix functionality Enable, a digital output the fixed functionality OK.
Further digital inputs are used for the triggering of blocks (see blocks and triggering).
The function of each digital output can be determined by the selection from a predefined list:
Command value = actual value Actual value higher or lower than the adjustable threshold Waiting time completed Ramp active internal flag set Error flag set Table completed Error status Block timeout Controller active Absolute value (actual value) < window Absolute value (command value) < window Incremental home position
Digital position measurement system
If VT-HACD-3-2X is used as control electronics, digital position measurement systems of type SSI or incremental can be used for actual value recording.
Limitations of use for the incremental encoder
The maximum frequency of the HACD incremental encoder input (fG) is 250 kHz. The maximum travel velocity of the drive, the resolution (res) of the encoder system used and the possible signal evaluation by EXE (interpolation and digitalizing electronics) determine the frequency.
Determination formulas
Encoder resolution at given maximum velocity:

Velocity at specified encoder resolution:

Controller
If the HACD is used as control electronics, select "Controller" for signal linking [8].
The LCx signals indicate the command value branch, the LFBx signals indicate the actual value branch. [8]
Both SSI encoder or incremental encoder [2] (digital measurement system) and one or more analog sensors can be used as actual value signal.
The controller structure is designed as PIDT1 controller, whereas each share can be activated or deactivated individually. Thus, also a P or PT1 controller can be implemented for example. The I share can additionally be controlled via a window (upper and lower limit).
Control parameters can be set in blocks or independently of blocks.
A state feedback can be used for controller output damping.
Controller structure:
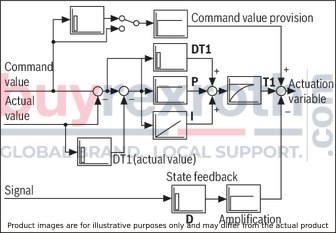
Adjustment to hydraulic system
For the optimum adjustment to the particularities of hydraulic drives, the following functions are implemented upstream the analog output:
Direction-dependent amplification [10]For positive and negative values, the amplification can be set separately. In this way, adjustment to the area ratio of a differential cylinder is possible.
Characteristic curve correction [11]In this way, the progressive flow characteristics of proportional directional valves are compensated or an inflected characteristic curve is realized.
Overlap jump/residual velocity [12]When using valves with positive overlap, a fine positioning can be used in case of a PDT1 controller in order to increase the static accuracy. This fine positioning can be selected according to the residual voltage principle and as overlap jump.
Zero point correction (offset) [13]Serves the correction of the zero point of the connected proportional servo valve.
Error detection and treatment
The HACD supports numerous error monitoring possibilities:
Monitoring of analog inputs for lower deviation or exceeding of the range Monitoring the sensor technology for cable break Control error monitoring when configuring the HACD as controller Monitoring of the supply voltage, any internalvoltage as well as the ±10 V reference voltage
Monitoring the microcontroller (watchdog) as well as the memory (checksum). The error monitoring as well as its reaction can be configured as well.
[ ] = Assignment to the block diagram
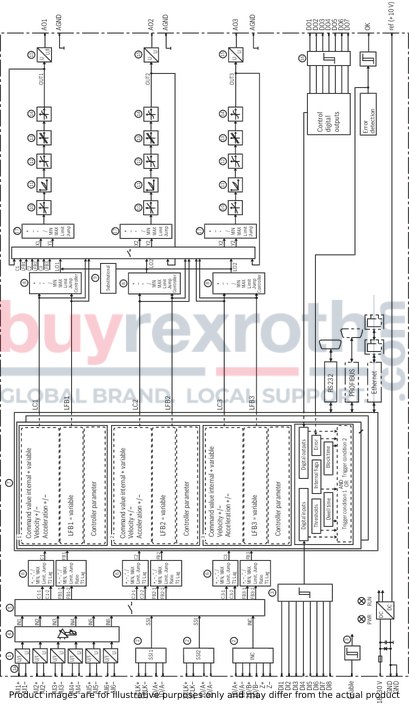
Block diagram: Structural editor
|
1 |
Analog voltage or current inputs |
|
1a |
High-impedance input AI1 |
|
2 |
SSI or incremental |
|
3 |
Enable input and digital inputs |
|
4 |
Analog input adjustment |
|
5 |
Switching matrix |
|
6 |
Math. connection of inputs |
|
7 |
32 blocks for command value generation, controller parameter switching |
|
8 |
Math. connection and/or controller |
|
9 |
Substitutional control |
|
10 |
Direction-dependent amplification |
|
11 |
Characteristic curve adjustment |
|
12 |
Residual velocity and overlap jump |
|
13 |
Offset |
|
14 |
Limitation |
|
15 |
Analog voltage or current outputs |
|
16 |
OK output and digital outputs |
|
17 |
Math. connection of outputs |
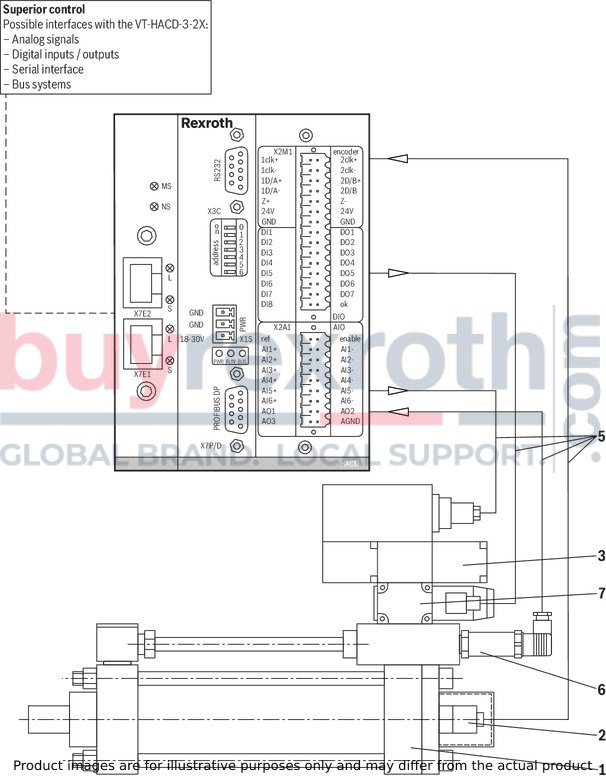
Example: VT-HACD-3-2X/… with one hydraulic cylinder axis
|
1 |
Differential cylinder |
|
2 |
integrated position measurement system |
|
3 |
Proportional servo valve with integrated control electronics |
|
4 |
VT-HACD-3-2X |
|
5 |
Connection cable |
|
6 |
Pressure transducer |
|
7 |
Sandwich plate shut-off valve (with connector switching amplifier) |
Pin assignment
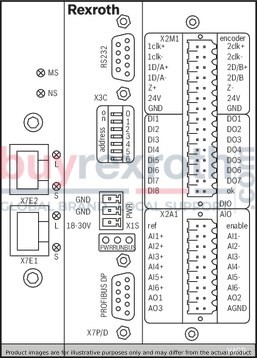
Pinout
|
X3C |
RS232 |
|
Pin |
|
|
1 |
LCAN_H |
|
2 |
TxD |
|
3 |
RxD |
|
4 |
reserved |
|
5 |
GND |
|
6 |
reserved |
|
7 |
reserved |
|
8 |
reserved |
|
9 |
LCAN_L |
|
X1S |
Power |
|
Pin |
|
|
1 |
GND |
|
2 |
GND |
|
3 |
18 – 30 V |
|
X7P |
PROFIBUS DP |
|
Pin |
|
|
1 |
reserved |
|
2 |
reserved |
|
3 |
RxD/TxD-P |
|
4 |
CNTR-P |
|
5 |
DGND |
|
6 |
VP |
|
7 |
reserved |
|
8 |
RxD/TxD-N |
|
9 |
reserved |
|
X7E1, X7E2 |
|
|
Ethernet ports |
|
|
X2M1 |
Encoder/DIO (Digital) |
|
1clk+ |
2clk+ |
|
1clk- |
2clk- |
|
1D/A+ |
2D/B+ |
|
1D/A- |
2D/B- |
|
Z+ |
Z- |
|
24V |
24V |
|
GND |
GND |
|
DI1 |
DO1 |
|
DI2 |
DO2 |
|
DI3 |
DO3 |
|
DI4 |
DO4 |
|
DI5 |
DO5 |
|
DI6 |
DO6 |
|
DI7 |
DO7 |
|
DI8 |
ok |
|
X2A1 |
AIO (Analog) |
|
ref |
enable |
|
AI1+ |
AI1- |
|
AI2+ |
AI2- |
|
AI3+ |
AI3- |
|
AI4+ |
AI4- |
|
AI5+ |
AI5- |
|
AI6+ |
AI6- |
|
AO1 |
AO2 |
|
AO3 |
AGND |
Notes:
The pins marked with "reserved" are reserved and must not be connected!
PROFIBUS DP (port X7P/D) is not available with the Ethernet version.
VT-HACD-3-2X/ (without Ethernet)
Dimensions in mm
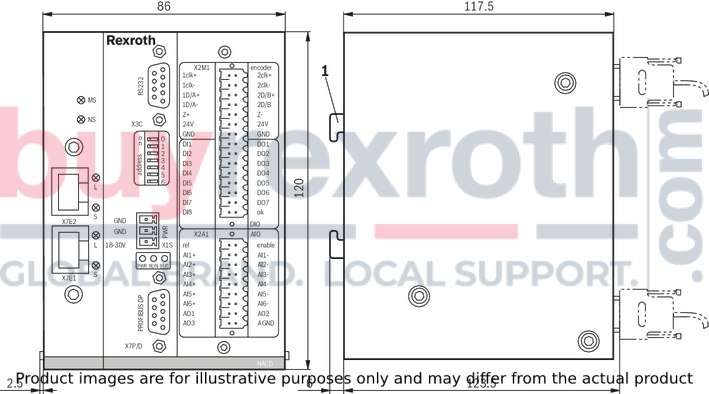
|
1 |
Installation on top hat rail TH 35-7.5 or TH 35-15 according to EN 60715 |
VT-HACD-3-2X/ (with Ethernet)
Dimensions in mm

|
1 |
Installation on top hat rail TH 35-7.5 or TH 35-15 according to EN 60715 |
Related Products
R961009670
$153.00 USD
R901495806
$578.00 USD
R900776897
$168.00 USD
R901444436
$577.00 USD
R901361303
$5,919.00 USD